Engineer
Focused on one thing and explored myself.
Sept. 2010 ~ Jun. 2016Explored vehicle engine major.
Sept. 2016 ~ Jun. 2020Explored robotics major, especially on motion planning and control.
Jan. 2020 ~ Dec. 2022TBD.
Sept. 2023 ~ TBDIntroduction to Linear Systems and Theory
Sept. 2022 ~ Dec. 2022Dynamics
Aug. 2023 ~ Dec. 2023Robot Dexterous Manipulation
May. 2021 ~ Sept. 2022Rough Terrain vehicle Learning-based Control
May. 2022 ~ Dec. 2022Robot Dexterous Manipulation
May. 2023 ~ Aug. 2023Autonomous Vehicles
Sept. 2023 ~ Present
1. Implemented algorithms from scratch on CARLA simulation to build a time-aligned dataset, including collecting, transforming and real-time plotting sensor data.
2. Implemented a CNN & LSTM based model from scratch to make motion prediction of an autonomous ground vehicle in urban area and arbitrary rough terrain area. The imported rough terrain map is customized on RoadRunner.
3. Implemented a MPPI-Control based algorithm to guide the motion planning and control of the vehicle.
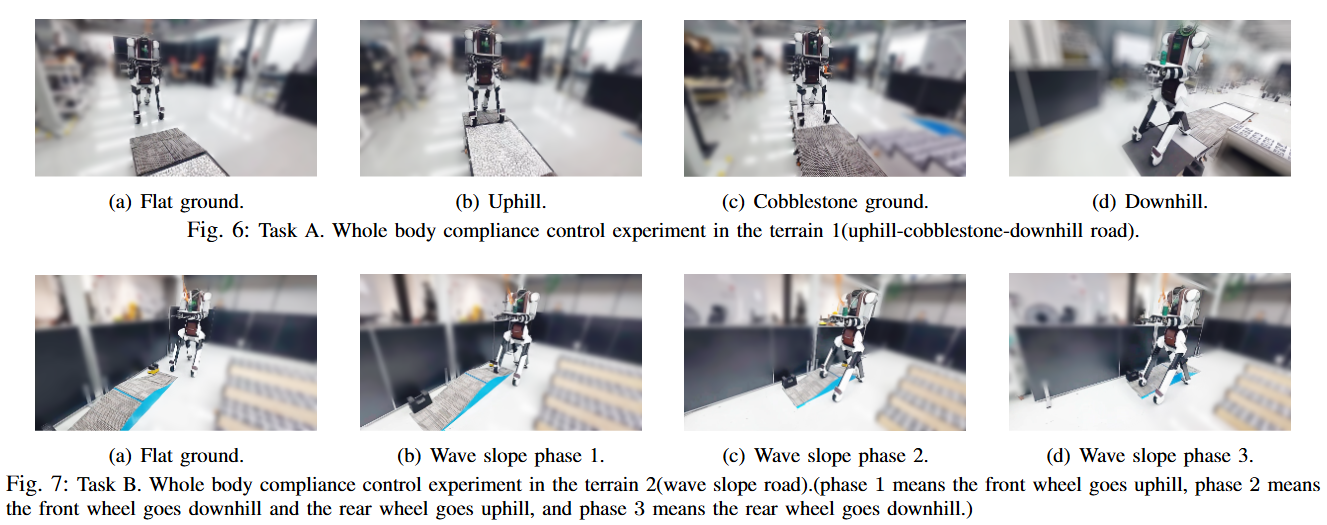
1. Developed an analytical bang-bang control solution for a humanoid robotic system that uses variable damping-based impedance coordinative control to optimize lower limb energy consumption caused by upper body oscillation while enabling passive stability of objects held on upper arms, adapting to uncertain lower limb motion.
1. An Alternative Authority Control (AAC) framework is introduced, facilitating the dynamic distribution of control authority among robotic agents.
2. A Model Predictive Control with Flexible Control Barrier Functions (MPC-FCBF) framework is proposed to enhance dynamic obstacle avoidance capabilities.
3. A hierarchical control architecture is developed by integrating the AAC and MPC-FCBF frameworks, offering efficient dynamic authority allocation and improved obstacle avoidance for multi-agent robotic systems.
Geek
Nerd
Rookie
© 2025 LeiSHI